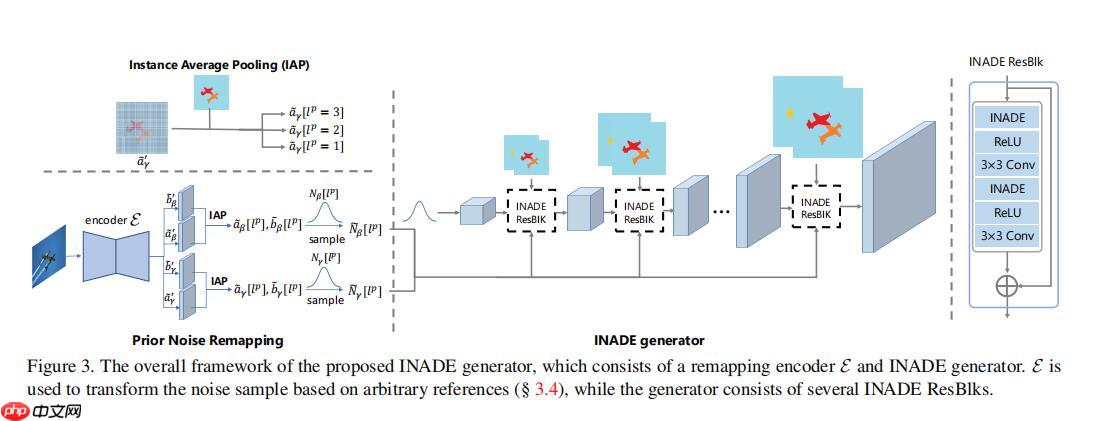
INADE基于SPADE改进,是一种条件归一化方法,旨在提升语义图像生成多样性。它结合语义分割(提供普遍性)与实例分割(提供特殊性),通过统一噪声采样协调各归一化层,避免不一致。编码器生成相关噪声辅助训练,解决了现有方法中同语义实例风格趋同的问题,实现语义级和实例级多样性。
☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜

首先这篇论文也是主要基于一个SPADE的论文,这里还是强推FutureSI项目的spade讲解,但是呢这个SPADE被它改成了INADE,同样是一个conditional normal,之所以这么改,原作者目的是提高一个图像生成的多样性。后面会具体讲解
这里描述一下它对于语义生成任务的看法:
这里就是说SPADE很好用
这里认为对于模型只输入一个语义分割信息,明显不够,靠只输入这玩意要求模型有太好的效果多样性,几乎不可能
这里说明GroupNet是不行的,这里这个改进方案GroupDNet我在我的项目论文解读一篇关于语义生成论文(要求控制单独语义生成)提到,这是另一篇论文啊。
与第二点有点呼应的味道
这个时候它讲了一下这个INADE添加实例分割的想法来源:
这里我认为就是普遍性与特殊性的合理结合,语义分割提供普遍性,实例分割提供特殊性。就比如两只比翼双飞的鸟,都是鸟(普遍性),但是2个不同个体(特殊性)。如果没有实例分割输入,那就退化输入语义分割。
考虑到生成网络包含多个条件归一化层,一个统一的采样解决方案仍然是协调所有这些层的关键。一种直接的方法,即对每个归一化层进行独立的随机抽样,可能会引入不一致性,并导致多样性被严重中和。因此,在本文中,我们提出了一种实例自适应调制采样方法,该方法可以在channel不相等的多个归一化层上实现一致的实例采样。
说白了就是在INADE输入一个贯穿deocder的noise,强调了一下这个noise这个融合的idea很牛逼,需要吹一下
Cursor
一个新的IDE,使用AI来帮助您重构、理解、调试和编写代码。
847 查看详情

首先这个INADE它为了提高这个多样性主要想法是什么呢,它比起SPADE多了一个实例分割的输入,见这张图。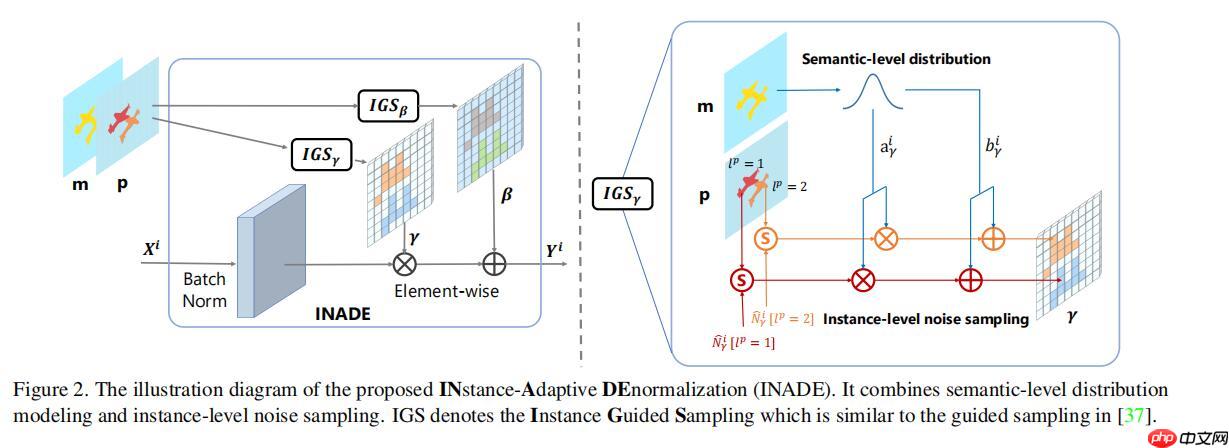
m就是语义分割输入,p是实例分割输入,这应该是一张照片上的两个鸟,语义分割把它们用同一标识,但是实例分割进行了区分。
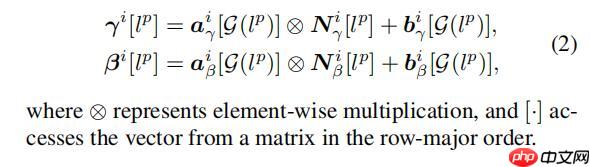
INADE数学公式表示

这是INADE,实际pytorch代码:
class ILADE(nn.Module):
def __init__(self, config_text, norm_nc, label_nc, noise_nc):
super().__init__()
self.norm_nc = norm_nc assert config_text.startswith('spade')
parsed = re.search('spade(\D+)(\d)x\d', config_text)
param_free_norm_type = str(parsed.group(1)) if param_free_norm_type == 'instance':
self.param_free_norm = nn.InstanceNorm2d(norm_nc, affine=False) elif param_free_norm_type == 'syncbatch':
self.param_free_norm = SynchronizedBatchNorm2d(norm_nc, affine=False) elif param_free_norm_type == 'batch':
self.param_free_norm = nn.BatchNorm2d(norm_nc, affine=False) else: raise ValueError('%s is not a recognized param-free norm type in SPADE'
% param_free_norm_type) # wights and bias for each class
self.weight = nn.Parameter(torch.Tensor(label_nc, norm_nc,2))
self.bias = nn.Parameter(torch.Tensor(label_nc, norm_nc,2))
self.reset_parameters()
self.fc_noise = nn.Linear(noise_nc, norm_nc) def reset_parameters(self):
nn.init.uniform_(self.weight)
nn.init.zeros_(self.bias) def forward(self, x, segmap, input_instances=None, noise=None):
# Part 1. generate parameter-free normalized activations
# noise is [B, inst_nc, 2, noise_nc], 2 is for scale and bias
normalized = self.param_free_norm(x) # Part 2. scale the segmentation mask and instance mask
segmap = F.interpolate(segmap, size=x.size()[2:], mode='nearest')
input_instances = F.interpolate(input_instances, size=x.size()[2:], mode='nearest') # the segmap is concate with instance map
inst_map = torch.unsqueeze(segmap[:,-1,:,:],1)
segmap = segmap[:,:-1,:,:] # Part 3. class affine with noise
noise_size = noise.size() # [B,inst_nc,2,noise_nc]
noise_reshape = noise.view(-1, noise_size[-1]) # reshape to [B*inst_nc*2,noise_nc]
noise_fc = self.fc_noise(noise_reshape) # [B*inst_nc*2, norm_nc]
noise_fc = noise_fc.view(noise_size[0],noise_size[1],noise_size[2],-1) # create weigthed instance noise for scale
class_weight = torch.einsum('ic,nihw->nchw', self.weight[...,0], segmap)
class_bias = torch.einsum('ic,nihw->nchw', self.bias[...,0], segmap) # init_noise = torch.randn([x.size()[0], input_instances.size()[1], self.norm_nc], device=x.get_device())
instance_noise = torch.einsum('nic,nihw->nchw', noise_fc[:,:,0,:], input_instances)
scale_instance_noise = class_weight*instance_noise+class_bias # create weighted instance noise for bias
class_weight = torch.einsum('ic,nihw->nchw', self.weight[..., 1], segmap)
class_bias = torch.einsum('ic,nihw->nchw', self.bias[..., 1], segmap) # init_noise = torch.randn([x.size()[0], input_instances.size()[1], self.norm_nc], device=x.get_device())
instance_noise = torch.einsum('nic,nihw->nchw', noise_fc[:,:,1,:], input_instances)
bias_instance_noise = class_weight * instance_noise + class_bias
out = scale_instance_noise * normalized + bias_instance_noise return out
下面是我写的paddle版本
In [1]import paddleimport paddle.nn as nnimport paddle.nn.functional as F'''
在这里有一个einsum相信大家也不用一般,至少我不用啊,哈哈
在这里的用法,我举例一下
instance_noise = paddle.einsum('nic,nihw->nchw', noise_fc[:,:,0,:], input_instances)#[B,instance_nc,norm_nc] [B,instance_nc,h,w] ->[B,norm_nc,h,w]
noise_fc[:,:,0,:],input_instances这两个tensor.shape分别为[B,instance_nc,norm_nc] [B,instance_nc,h,w]
经过了上述的这里einsum操作,就得到shape为[B,norm_nc,h,w]的tensor,那这里很明显就是相当于在nn.linear放在第1维进行的那种感觉无bias,矩阵乘法
'''class INADE(nn.Layer):
def __init__(self, norm_nc = 64, label_nc = 46, noise_nc = 108):
super().__init__()
self.param_free_norm = nn.InstanceNorm2D(norm_nc,weight_attr=False, bias_attr=False) # wights and bias for each class
weight = self.create_parameter([label_nc,norm_nc,2], default_initializer = paddle.nn.initializer.Uniform())#随机均匀分布初始化函数
self.add_parameter("weight", weight)
bias = self.create_parameter([label_nc,norm_nc,2],default_initializer = paddle.nn.initializer.Constant())
self.add_parameter("bias", bias)
self.fc_noise = nn.Linear(noise_nc, norm_nc) def forward(self, x, segmap, input_instances=None, noise=None):
# Part 1. generate parameter-free normalized activations
# noise is [B, inst_nc, 2, noise_nc], 2 is for scale and bias
normalized = self.param_free_norm(x) # Part 2. scale the segmentation mask and instance mask
segmap = F.interpolate(segmap, size=x.shape[2:], mode='nearest')
input_instances = F.interpolate(input_instances, size=x.shape[2:], mode='nearest') # the segmap is concate with instance map
inst_map = paddle.unsqueeze(segmap[:,-1,:,:],1)# 后面就不用了
segmap = segmap[:,:-1,:,:] # Part 3. class affine with noise
noise_size = noise.shape # [B,inst_nc,2,noise_nc]
noise_reshape = noise.reshape([-1, noise_size[-1]]) # reshape to [B*inst_nc*2,noise_nc]
noise_fc = self.fc_noise(noise_reshape) # [B*inst_nc*2, norm_nc]
noise_fc = noise_fc.reshape([noise_size[0],noise_size[1],noise_size[2],-1])#[B,instance_nc,2,norm_nc]
print("noise_fc",noise_fc.shape) # create weigthed instance noise for scale
class_weight = paddle.einsum('ic,nihw->nchw', self.weight[...,0], segmap)#[label_nc, norm_nc] [b,label_nc,h,w] ->#[B,norm_nc,h,w]
print("class_weight",class_weight.shape)
class_bias = paddle.einsum('ic,nihw->nchw', self.bias[...,0], segmap)#[label_nc, norm_nc] [b,label_nc,h,w] ->#[B,norm_nc,h,w]
# init_noise = torch.randn([x.size()[0], input_instances.size()[1], self.norm_nc], device=x.get_device())
instance_noise = paddle.einsum('nic,nihw->nchw', noise_fc[:,:,0,:], input_instances)#[B,instance_nc,norm_nc] [B,instance_nc,h,w] ->[B,norm_nc,h,w]
scale_instance_noise = class_weight*instance_noise+class_bias # create weighted instance noise for bias
class_weight = paddle.einsum('ic,nihw->nchw', self.weight[..., 1], segmap)
class_bias = paddle.einsum('ic,nihw->nchw', self.bias[..., 1], segmap) # init_noise = torch.randn([x.size()[0], input_instances.size()[1], self.norm_nc], device=x.get_device())
instance_noise = paddle.einsum('nic,nihw->nchw', noise_fc[:,:,1,:], input_instances)#[B,instance_nc,norm_nc] #[B,instance_nc,h,w]
bias_instance_noise = class_weight * instance_noise + class_bias
out = scale_instance_noise * normalized + bias_instance_noise return out
x = paddle.randn([3,64,50,50])
segmap = paddle.randn([3,47,66,66])
inst = paddle.randn([3,72,50,50])
noise = paddle.randn([3,72,2,108])
INADE()(x,segmap,inst,noise).shape
W0222 11:03:38.883304 183 device_context.cc:447] Please NOTE: device: 0, GPU Compute Capability: 7.0, Driver API Version: 10.1, Runtime API Version: 10.1 W0222 11:03:38.890153 183 device_context.cc:465] device: 0, cuDNN Version: 7.6.
noise_fc [3, 72, 2, 64] class_weight [3, 64, 50, 50]
[3, 64, 50, 50]
这里还有一个细节就是,这个noise要和这个输入的图片信息有关系,相当于这个z是包含信息的。这样方便训练,嗯。 这里代码实现很复杂,实在有兴趣自己看原项目,因为这里我不能用到我的项目上我就没有太关心。加油.
开个玩笑啊,其实这里这个noise的设计具体落实到代码里面其实是很重要的,因为其中第一点是可以通过noise来进行模型生成多样性的增加和控制,然后另外就是这个noise开始训练的时候必须要和原图信息有关联,这样好训练,不然如果这个Noise直接初始化就很难训练。
接下来我就直接从代码的角度去分析实际pytorch代码中的主体实践。
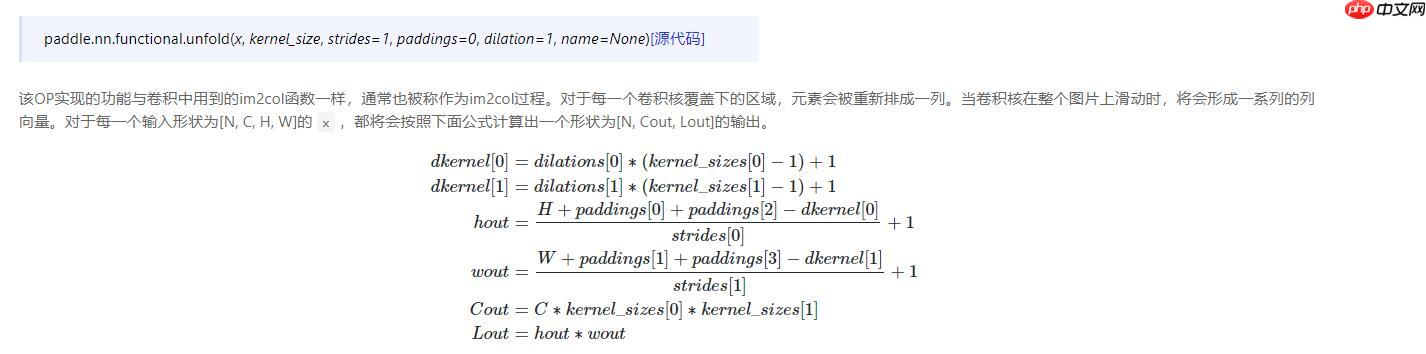
import paddleimport paddle.nn as nn x = paddle.randn((100,3,224,224)) unfold = nn.Unfold(kernel_sizes=[3, 3]) result = unfold(x) #result.shape = [100,3*3*3,(224-3+1)*(224-3+1)]print(result.shape)
'''
该代码块是重新构造一个encoder里面用到的卷积封装,这个encoder就是为了训练时候构造这个noise用的
'''import paddleimport paddle.nn.functional as Fimport paddle.nn as nnclass InstanceAwareConv2d(nn.Layer):
def __init__(self, fin = 64, fout = 128, kw = 3, stride=1, padding=1):
super().__init__( )
self.kw = kw
self.stride = stride
self.padding = padding
self.fin = fin
self.fout = fout
self.unfold = nn.Unfold(kw, strides = stride, paddings = padding)
weight = self.create_parameter([fout, fin, kw, kw], default_initializer = paddle.nn.initializer.Uniform())#随机均匀分布初始化函数
self.add_parameter("weight", weight)
bias = self.create_parameter([fout],default_initializer = paddle.nn.initializer.Constant())
self.add_parameter("bias", bias) def forward(self, x, instances, check=False):
N,C,H,W = x.shape # cal the binary mask from instance map
instances = F.interpolate(instances, x.shape[2:], mode='nearest') # [n,1,h,w]
inst_unf = self.unfold(instances) # print("inst_unf",inst_unf.shape)
# substract the center pixel
center = paddle.unsqueeze(inst_unf[:, self.kw * self.kw // 2, :], axis=1)#因为instance的channel为1,所以这个channel的center 为 self.kw * self.kw // 2
# print("center",center.shape)
mask_unf = inst_unf - center # clip the absolute value to 0~1
mask_unf = paddle.abs(mask_unf)
mask_unf = paddle.clip(mask_unf, 0, 1)
mask_unf = 1.0 - mask_unf # [n,k*k,L]
# print("mask_unf",mask_unf.shape)#mask_unf [4, 9, 65536]
# # multiply mask_unf and x
x_unf = self.unfold(x) # [n,c*k*k,L]
# print("x_unf",x_unf.shape) #x_unf [4, 64*9, 65536]
x_unf = x_unf.reshape([N, C, -1, x_unf.shape[-1]]) # [n,c,k*k,L]
# print("x_unf",x_unf.shape) #[4, 64, 9, 65536]
mask = paddle.unsqueeze(mask_unf,1) # [n,1,k*k,L]
mask_x = mask * x_unf # [n,c,k*k,L]
mask_x = mask_x.reshape([N,-1,mask_x.shape[-1]]) # [n,c*k*k,L]
# # conv operation
weight = self.weight.reshape([self.fout,-1]) # [fout, c*k*k]
out = paddle.einsum('cm,nml->ncl', weight, mask_x) # print("out",out.shape)#[4, 128, 65536]
# # x_unf = torch.unsqueeze(x_unf, 1) # [n,1,c*k*k,L]
# # out = torch.mul(masked_weight, x_unf).sum(dim=2, keepdim=False) # [n,fout,L]
bias = paddle.unsqueeze(paddle.unsqueeze(self.bias,0),-1) # [1,fout,1]
out = out + bias # print("out",out.shape)#[4, 128, 65536]
out = out.reshape([N,self.fout,H//self.stride,W//self.stride]) # # print('weight:',self.weight[0,0,...])
# # print('bias:',self.bias)
if check:
out2 = nn.functional.conv2d(x, self.weight, self.bias, stride=self.stride, padding=self.padding) print((out-out2).abs().max()) return out
x = paddle.randn([4,64,256,256])
y = paddle.randn([4,1,256,256])
InstanceAwareConv2d()(x,y).shape
)
self.kw = kw
self.stride = stride
self.padding = padding
self.fin = fin
self.fout = fout
self.unfold = nn.Unfold(kw, strides = stride, paddings = padding)
weight = self.create_parameter([fout, fin, kw, kw], default_initializer = paddle.nn.initializer.Uniform())#随机均匀分布初始化函数
self.add_parameter("weight", weight)
bias = self.create_parameter([fout],default_initializer = paddle.nn.initializer.Constant())
self.add_parameter("bias", bias) def forward(self, x, instances, check=False):
N,C,H,W = x.shape # cal the binary mask from instance map
instances = F.interpolate(instances, x.shape[2:], mode='nearest') # [n,1,h,w]
inst_unf = self.unfold(instances) # print("inst_unf",inst_unf.shape)
# substract the center pixel
center = paddle.unsqueeze(inst_unf[:, self.kw * self.kw // 2, :], axis=1)#因为instance的channel为1,所以这个channel的center 为 self.kw * self.kw // 2
# print("center",center.shape)
mask_unf = inst_unf - center # clip the absolute value to 0~1
mask_unf = paddle.abs(mask_unf)
mask_unf = paddle.clip(mask_unf, 0, 1)
mask_unf = 1.0 - mask_unf # [n,k*k,L]
# print("mask_unf",mask_unf.shape)#mask_unf [4, 9, 65536]
# # multiply mask_unf and x
x_unf = self.unfold(x) # [n,c*k*k,L]
# print("x_unf",x_unf.shape) #x_unf [4, 64*9, 65536]
x_unf = x_unf.reshape([N, C, -1, x_unf.shape[-1]]) # [n,c,k*k,L]
# print("x_unf",x_unf.shape) #[4, 64, 9, 65536]
mask = paddle.unsqueeze(mask_unf,1) # [n,1,k*k,L]
mask_x = mask * x_unf # [n,c,k*k,L]
mask_x = mask_x.reshape([N,-1,mask_x.shape[-1]]) # [n,c*k*k,L]
# # conv operation
weight = self.weight.reshape([self.fout,-1]) # [fout, c*k*k]
out = paddle.einsum('cm,nml->ncl', weight, mask_x) # print("out",out.shape)#[4, 128, 65536]
# # x_unf = torch.unsqueeze(x_unf, 1) # [n,1,c*k*k,L]
# # out = torch.mul(masked_weight, x_unf).sum(dim=2, keepdim=False) # [n,fout,L]
bias = paddle.unsqueeze(paddle.unsqueeze(self.bias,0),-1) # [1,fout,1]
out = out + bias # print("out",out.shape)#[4, 128, 65536]
out = out.reshape([N,self.fout,H//self.stride,W//self.stride]) # # print('weight:',self.weight[0,0,...])
# # print('bias:',self.bias)
if check:
out2 = nn.functional.conv2d(x, self.weight, self.bias, stride=self.stride, padding=self.padding) print((out-out2).abs().max()) return out
x = paddle.randn([4,64,256,256])
y = paddle.randn([4,1,256,256])
InstanceAwareConv2d()(x,y).shape
W0222 16:13:26.634137 145 device_context.cc:447] Please NOTE: device: 0, GPU Compute Capability: 7.0, Driver API Version: 10.1, Runtime API Version: 10.1 W0222 16:13:26.638576 145 device_context.cc:465] device: 0, cuDNN Version: 7.6.
[4, 128, 256, 256]In [ ]
# Encoder构造import paddle
import paddle.nn as nnimport numpy as npclass Encoder_OPT:
def __init__(self):
super().__init__()
self.ngf = 64
self.semantic_nc = 46
self.no_instance = True
self.noise_nc = 108opt = Encoder_OPT()class instanceAdaptiveEncoder(nn.Layer):
def __init__(self, opt):
super().__init__()
self.opt = opt
kw = 3
pw = int(np.ceil((kw - 1.0) / 2))
ndf = opt.ngf
conv_layer = InstanceAwareConv2d
self.layer1 = conv_layer(3, ndf, kw, stride=2, padding=pw)
self.norm1 = nn.InstanceNorm2D(ndf)
self.layer2 = conv_layer(ndf * 1, ndf * 2, kw, stride=2, padding=pw)
self.norm2 = nn.InstanceNorm2D(ndf * 2)
self.layer3 = conv_layer(ndf * 2, ndf * 4, kw, stride=2, padding=pw)
self.norm3 = nn.InstanceNorm2D(ndf * 4)
self.layer4 = conv_layer(ndf * 4, ndf * 8, kw, stride=2, padding=pw)
self.norm4 = nn.InstanceNorm2D(ndf * 8)
self.middle = conv_layer(ndf * 8, ndf * 4, kw, stride=1, padding=pw)
self.norm_middle = nn.InstanceNorm2D(ndf * 4)
self.up1 = conv_layer(ndf * 8, ndf * 2, kw, stride=1, padding=pw)
self.norm_up1 = nn.InstanceNorm2D(ndf * 2)
self.up2 = conv_layer(ndf * 4, ndf * 1, kw, stride=1, padding=pw)
self.norm_up2 = nn.InstanceNorm2D(ndf)
self.up3 = conv_layer(ndf * 2, ndf, kw, stride=1, padding=pw)
self.norm_up3 = nn.InstanceNorm2D(ndf)
self.up = nn.Upsample(scale_factor=2, mode='bilinear')
self.class_nc = opt.semantic_nc if opt.no_instance else opt.semantic_nc-1
self.scale_conv_mu = conv_layer(ndf, opt.noise_nc, kw, stride=1, padding=pw)
self.scale_conv_var = conv_layer(ndf, opt.noise_nc, kw, stride=1, padding=pw)
self.bias_conv_mu = conv_layer(ndf, opt.noise_nc, kw, stride=1, padding=pw)
self.bias_conv_var = conv_layer(ndf, opt.noise_nc, kw, stride=1, padding=pw)
self.actvn = nn.LeakyReLU(0.2, False)
self.opt = opt def instAvgPooling(self, x, instances):
inst_num = instances.shape[1] for i in range(inst_num):
inst_mask = paddle.unsqueeze(instances[:,i,:,:], 1) # [n,1,h,w]
pixel_num = paddle.sum(paddle.sum(inst_mask, axis=2, keepdim = True), axis=3, keepdim=True)
pixel_num[pixel_num == 0] = 1 #防止某一个instance的label 某一行或某一列没有,防止后续步骤中作为除数报错
feat = x * inst_mask#只需要该label的x信息,inst_mask为0或1.
feat = paddle.sum(paddle.sum(feat, axis =2, keepdim=True), axis=3, keepdim=True) / pixel_num if i == 0:
out = paddle.unsqueeze(feat[:,:,0,0],1) # [n,1,c]
else:
out = paddle.concat([out,paddle.unsqueeze(feat[:,:,0,0],1)],1) # inst_pool_feats.append(feat[:,:,0,0]) # [n, 64]
return out #shape = [n,inst_num,c]
def forward(self, x, input_instances):
# instances [n,1,h,w], input_instances [n,inst_nc,h,w] 注意一下这个shape
instances = paddle.argmax(input_instances, 1, keepdim=True).astype("float32") print("instance",instances.shape)
x1 = self.actvn(self.norm1(self.layer1(x,instances)))
x2 = self.actvn(self.norm2(self.layer2(x1,instances)))
x3 = self.actvn(self.norm3(self.layer3(x2,instances)))
x4 = self.actvn(self.norm4(self.layer4(x3,instances))) print("x1",x1.shape,"x2",x2.shape,"x3",x3.shape,"x4",x4.shape) #x1 [4, 64, 128, 128] x2 [4, 128, 64, 64] x3 [4, 256, 32, 32] x4 [4, 512, 16, 16]
y = self.up(self.actvn(self.norm_middle(self.middle(x4,instances))))
y1 = self.up(self.actvn(self.norm_up1(self.up1(paddle.concat([y,x3],1),instances))))
y2 = self.up(self.actvn(self.norm_up2(self.up2(paddle.concat([y1, x2], 1),instances))))
y3 = self.up(self.actvn(self.norm_up3(self.up3(paddle.concat([y2, x1], 1),instances)))) print("y",y.shape,"y1",y1.shape,"y2",y2.shape,"y3",y3.shape)# y [4, 256, 32, 32] y1 [4, 128, 64, 64] y2 [4, 64, 128, 128] y3 [4, 64, 256, 256]
scale_mu = self.scale_conv_mu(y3,instances)
scale_var = self.scale_conv_var(y3,instances)
bias_mu = self.bias_conv_mu(y3,instances)
bias_var = self.bias_conv_var(y3,instances)
scale_mus = self.instAvgPooling(scale_mu,input_instances)
scale_vars = self.instAvgPooling(scale_var,input_instances)
bias_mus = self.instAvgPooling(bias_mu,input_instances)
bias_vars = self.instAvgPooling(bias_var,input_instances) return scale_mus, scale_vars, bias_mus, bias_vars #shape都为[batch_size,instance_nc,noise_num]encoder = instanceAdaptiveEncoder(opt)
x = paddle.randn([4,3,256,256])
input_instances = paddle.randn([4,72,256,256])
encoder(x,input_instances)
In [5]
class Encoder_OPT:
def __init__(self):
super().__init__()
self.ngf = 64
self.semantic_nc = 2
self.no_instance = True
self.noise_nc = 108opt = Encoder_OPT()def instance_encode_z(real_image, input_instances):
s_mus, s_logvars, b_mus, b_logvars = instanceAdaptiveEncoder(opt)(real_image,input_instances)
z = [s_mus,paddle.exp(0.5 * s_logvars),b_mus,paddle.exp(0.5 * b_logvars)] return z, s_mus, s_logvars, b_mus, b_logvars
instance_nc = 2real_image = paddle.randn([4,3,256,256])
input_instances = paddle.randn([4,instance_nc,256,256])
z, s_mus, s_logvars, b_mus, b_logvars = instance_encode_z(real_image,input_instances)#s_mus, s_logvars, b_mus, b_logvars这四个return是为了计算KLDLOSS
instance [4, 1, 256, 256] x1 [4, 64, 128, 128] x2 [4, 128, 64, 64] x3 [4, 256, 32, 32] x4 [4, 512, 16, 16] y [4, 256, 32, 32] y1 [4, 128, 64, 64] y2 [4, 64, 128, 128] y3 [4, 64, 256, 256]In [7]
# KLD_loss = (KLDLoss(s_mus, s_logvars)+KLDLoss(b_mus, b_logvars)) * .opt.lambda_kld / 2instance_nc = 2noise_nc = 108noise = paddle.randn([x.shape[0], instance_nc, 2,noise_nc])def pre_process_noise( noise, z):
'''
noise: [n,inst_nc,2,noise_nc], z_i [n,inst_nc,noise_nc]
z: [s_mus,torch.exp(0.5 * s_logvars),b_mus,torch.exp(0.5 * b_logvars)]
'''
s_noise = paddle.unsqueeze(noise[:,:,0,:].multiply(z[1])+z[0],2)
b_noise = paddle.unsqueeze(noise[:,:,1,:].multiply(z[3])+z[2],2) return paddle.concat([s_noise,b_noise],2)
noise = pre_process_noise(noise,z)#这个时候得到的noise才是贯穿decoder,其中INADE的一个输入的noiseprint(noise.shape) #[4,instance_nc,2,noise]
[4, 2, 2, 108]
那么train的时候这个noise可以得到了,但是decoder是基于一个很小的特征图逐渐上采样的,那么这个特征图作者采取得到的方法是直接randn加linear再reshape,初始化完全是没有任何信息的。这样的方法我看来是不错的,因为实际测试的时候decoder输入的就是标准正太分布,这样就防止了训练和测试的时候输入不一致的问题,防止模型依靠这个初始特征图的结构信息.(这个特征图的处理我正在实验,好像不太好训练)
batch_size = 4z = paddle.randn(batch_size, z_dim,
dtype=torch.float32, device=input.get_device())
x = nn.Linear(opt.z_dim, 16 * 64 * sw * sh)(z)
x = x.reshape(-1, 16 * 64, self.sh, self.sw)
以上就是INADE个人讲解和理解的详细内容,更多请关注其它相关文章!
# 一键
# 威威seo泛域名
# 延安网站建设主题论文
# 网站推广去哪家比较好做
# seo优化助理
# 沙井seo优化电话
# 杭州seo博客 牛牛
# 中山seo搜索栏分析
# 湖南营销推广咨询电话
# 宜昌网站建设网站优化
# 崇左网站的推广
# 安装包
# git
# 这个时候
# 考虑到
# 自适应
# 多个
# 在这里
# 这是
# 都是
# 中文网
# type
# fig
# ai
相关栏目:
【
Google疑问12 】
【
Facebook疑问10 】
【
优化推广96088 】
【
技术知识133117 】
【
IDC资讯59369 】
【
网络运营7196 】
【
IT资讯61894 】
相关推荐:
DreamAvatar数字人在哪里下载
大疆 Air 3 无人机售价和实物照片曝光
全新小艺搭载AI大模型,有效提升学生和职场人士的工作效率
OpenAI 向所有付费 API 用户开放 GPT-4
马斯克:将来机器人比人类多!特斯拉机器人亮相人工智能大会
谷歌旗下 DeepMind 开发出 RoboCat AI 模型,能控制多种机器人执行一系列任务
世界人工智能大会|“AI领航,共筑未来”高端保险论坛成功举办
亚太地区 70% 的企业高管正探索生成式 AI 应用或已经进行投资
速途网络成立“人工智能专家委员会”5位中美博士加盟
当人工智能开始写高考作文?作家陈崇正、朱山坡谈文学与未来
6月14日《星空下的对话》 张朝阳陆川将畅聊人生、电影、心理学与AI
微软Bing聊天机器人电脑端即将支持语音提问
“木头姐”:特斯拉的人工智能训练——“赢家通吃”的机会
猿辅导推出Motiff,整合三大AI功能,助力UI设计生产力革新
月薪6万,哪些AI岗位在抢人?
Prompt解锁语音语言模型生成能力,SpeechGen实现语音翻译、修补多项任务
消息称 Meta Quest 将推 VR 游戏订阅:每月 7.99 美元,任选两款
生成式人工智能如何改变云安全的游戏规则
利亚德加码AI战略,与光年无限图灵机器人全面开展AI研发业务合作
五项人工智能尚未能够实现的任务
WHEE上线时间介绍
2025VR&AR显示技术峰会展示歌尔光学最新一代光学模组
走进首家“元宇宙”未来工厂,卡奥斯探知工业之旅出发!
人工智能驱动智能建筑会是未来趋势吗?
有远见!华为四年前注册商标Vision Pro:苹果AR国内要改名
“五年内人类程序员将消失”预言引争议,AI真的那么强大了吗?
MiracleVision视觉大模型功能介绍
微软推出 LLaVA-Med AI 模型,可对医学病理案例进行分析
【趋势周报】全球元宇宙产业发展趋势:ChatGPT的出现,将元宇宙实现至少提前了10年
500元一张的AI艺术二维码制作,详细教程来了!
智能手机应用中的人工智能的重要性
改动一行代码,PyTorch训练三倍提速,这些「高级技术」是关键
加强高质量数据供应能力,促进通用人工智能大模型领域的创新
改变城市交通:智慧城市中的智能交通
实现MySQL数据锁定策略:解决并发冲突的J*a解决方案
IBM 与 NASA 携手开源地理空间 AI 模型,促进气候科学研究进步
英国前首相:AI可能被用来制造“生物恐怖武器”
小艺将具备大模型能力,鸿蒙4加速AI普及之路
专家解读国家网信办深度合成服务算法备案信息公告:不等于百度、阿里、腾讯等生成式AI产品获批
阿里云AI绘画创作大模型通义万相发布 已开启定向邀测
美图设计室2.0使用教程
苹果机器学习关键人物 Ali Farhadi 离职,回归 AI2 担任 CEO
微软在德国举办MR研讨会,向女性分享元宇宙潜力
人工智能赋能无人驾驶:商业化进程再提速
普林斯顿大学推出Infinigen AI模型 可生成真实自然环境 3D场景
1000万张照片训练AI模型 科学家找到水下定位新方法
猿编程参加人工智能高峰论坛,推动人工智能教育解决方案在千所学校推行
马斯克预测:特斯拉全自动驾驶将在今年实现 对AI深度变化感到担忧
美图影像节演讲实录:191次提及AI,发布7款影像生产力工具
业内领先 四川大学华西第四医院甲状腺乳腺外科成功进入手术机器人时代
2025-07-31

运城市盐湖区信雨科技有限公司是一家深耕海外推广领域十年的专业服务商,作为谷歌推广与Facebook广告全球合作伙伴,聚焦外贸企业出海痛点,以数字化营销为核心,提供一站式海外营销解决方案。公司凭借十年行业沉淀与平台官方资源加持,打破传统外贸获客壁垒,助力企业高效开拓全球市场,成为中小企业出海的可靠合作伙伴。

 )
self.kw = kw
self.stride = stride
self.padding = padding
self.fin = fin
self.fout = fout
self.unfold = nn.Unfold(kw, strides = stride, paddings = padding)
weight = self.create_parameter([fout, fin, kw, kw], default_initializer = paddle.nn.initializer.Uniform())#随机均匀分布初始化函数
self.add_parameter("weight", weight)
bias = self.create_parameter([fout],default_initializer = paddle.nn.initializer.Constant())
self.add_parameter("bias", bias) def forward(self, x, instances, check=False):
N,C,H,W = x.shape # cal the binary mask from instance map
instances = F.interpolate(instances, x.shape[2:], mode='nearest') # [n,1,h,w]
inst_unf = self.unfold(instances) # print("inst_unf",inst_unf.shape)
# substract the center pixel
center = paddle.unsqueeze(inst_unf[:, self.kw * self.kw // 2, :], axis=1)#因为instance的channel为1,所以这个channel的center 为 self.kw * self.kw // 2
# print("center",center.shape)
mask_unf = inst_unf - center # clip the absolute value to 0~1
mask_unf = paddle.abs(mask_unf)
mask_unf = paddle.clip(mask_unf, 0, 1)
mask_unf = 1.0 - mask_unf # [n,k*k,L]
# print("mask_unf",mask_unf.shape)#mask_unf [4, 9, 65536]
# # multiply mask_unf and x
x_unf = self.unfold(x) # [n,c*k*k,L]
# print("x_unf",x_unf.shape) #x_unf [4, 64*9, 65536]
x_unf = x_unf.reshape([N, C, -1, x_unf.shape[-1]]) # [n,c,k*k,L]
# print("x_unf",x_unf.shape) #[4, 64, 9, 65536]
mask = paddle.unsqueeze(mask_unf,1) # [n,1,k*k,L]
mask_x = mask * x_unf # [n,c,k*k,L]
mask_x = mask_x.reshape([N,-1,mask_x.shape[-1]]) # [n,c*k*k,L]
# # conv operation
weight = self.weight.reshape([self.fout,-1]) # [fout, c*k*k]
out = paddle.einsum('cm,nml->ncl', weight, mask_x) # print("out",out.shape)#[4, 128, 65536]
# # x_unf = torch.unsqueeze(x_unf, 1) # [n,1,c*k*k,L]
# # out = torch.mul(masked_weight, x_unf).sum(dim=2, keepdim=False) # [n,fout,L]
bias = paddle.unsqueeze(paddle.unsqueeze(self.bias,0),-1) # [1,fout,1]
out = out + bias # print("out",out.shape)#[4, 128, 65536]
out = out.reshape([N,self.fout,H//self.stride,W//self.stride]) # # print('weight:',self.weight[0,0,...])
# # print('bias:',self.bias)
if check:
out2 = nn.functional.conv2d(x, self.weight, self.bias, stride=self.stride, padding=self.padding) print((out-out2).abs().max()) return out
x = paddle.randn([4,64,256,256])
y = paddle.randn([4,1,256,256])
InstanceAwareConv2d()(x,y).shape
)
self.kw = kw
self.stride = stride
self.padding = padding
self.fin = fin
self.fout = fout
self.unfold = nn.Unfold(kw, strides = stride, paddings = padding)
weight = self.create_parameter([fout, fin, kw, kw], default_initializer = paddle.nn.initializer.Uniform())#随机均匀分布初始化函数
self.add_parameter("weight", weight)
bias = self.create_parameter([fout],default_initializer = paddle.nn.initializer.Constant())
self.add_parameter("bias", bias) def forward(self, x, instances, check=False):
N,C,H,W = x.shape # cal the binary mask from instance map
instances = F.interpolate(instances, x.shape[2:], mode='nearest') # [n,1,h,w]
inst_unf = self.unfold(instances) # print("inst_unf",inst_unf.shape)
# substract the center pixel
center = paddle.unsqueeze(inst_unf[:, self.kw * self.kw // 2, :], axis=1)#因为instance的channel为1,所以这个channel的center 为 self.kw * self.kw // 2
# print("center",center.shape)
mask_unf = inst_unf - center # clip the absolute value to 0~1
mask_unf = paddle.abs(mask_unf)
mask_unf = paddle.clip(mask_unf, 0, 1)
mask_unf = 1.0 - mask_unf # [n,k*k,L]
# print("mask_unf",mask_unf.shape)#mask_unf [4, 9, 65536]
# # multiply mask_unf and x
x_unf = self.unfold(x) # [n,c*k*k,L]
# print("x_unf",x_unf.shape) #x_unf [4, 64*9, 65536]
x_unf = x_unf.reshape([N, C, -1, x_unf.shape[-1]]) # [n,c,k*k,L]
# print("x_unf",x_unf.shape) #[4, 64, 9, 65536]
mask = paddle.unsqueeze(mask_unf,1) # [n,1,k*k,L]
mask_x = mask * x_unf # [n,c,k*k,L]
mask_x = mask_x.reshape([N,-1,mask_x.shape[-1]]) # [n,c*k*k,L]
# # conv operation
weight = self.weight.reshape([self.fout,-1]) # [fout, c*k*k]
out = paddle.einsum('cm,nml->ncl', weight, mask_x) # print("out",out.shape)#[4, 128, 65536]
# # x_unf = torch.unsqueeze(x_unf, 1) # [n,1,c*k*k,L]
# # out = torch.mul(masked_weight, x_unf).sum(dim=2, keepdim=False) # [n,fout,L]
bias = paddle.unsqueeze(paddle.unsqueeze(self.bias,0),-1) # [1,fout,1]
out = out + bias # print("out",out.shape)#[4, 128, 65536]
out = out.reshape([N,self.fout,H//self.stride,W//self.stride]) # # print('weight:',self.weight[0,0,...])
# # print('bias:',self.bias)
if check:
out2 = nn.functional.conv2d(x, self.weight, self.bias, stride=self.stride, padding=self.padding) print((out-out2).abs().max()) return out
x = paddle.randn([4,64,256,256])
y = paddle.randn([4,1,256,256])
InstanceAwareConv2d()(x,y).shape